Affine Transformations
Some notes on affine transformation conventions.
Mar 26, 2024A perpetual pain point for people working on computer vision is dealing with affine transformations. Usually you have a diagram that looks something like this:

Each of the coordinate frames can be represented as a 4x4 matrix in Numpy. For the three sensors in the image above we might have something like this:
T_world_to_lidar # 4x4
T_world_to_camera # 4x4
T_world_to_imu # 4x4
Suppose we have a point p in the world frame. We can transform it to one of the other frames using matrix multiplication:
p = np.array([x, y, z, 1])
p_lidar = T_world_to_lidar @ p # 4x4 @ 4x1 = 4x1
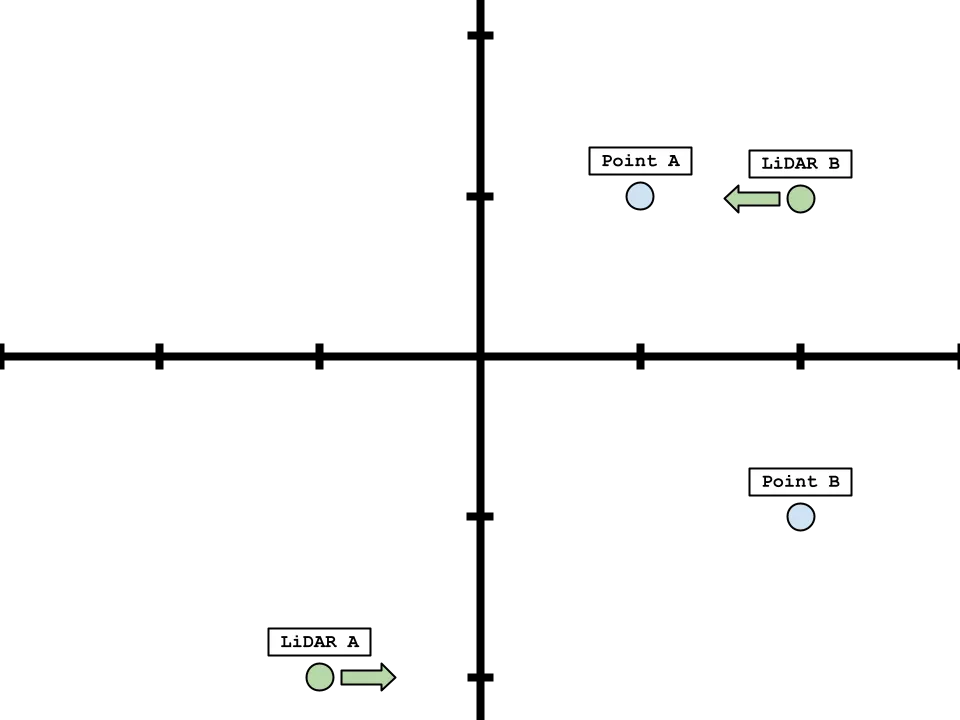
Here’s a toy example in 2D to illustrate the concept:
p_a_in_world = np.array([1, 1])
p_b_in_world = np.array([2, -1])
T_world_to_lidar_a = np.array([
[1, 0, 1],
[0, 1, 2],
[0, 0, 1],
])
T_world_to_lidar_b = np.array([
[-1, 0, 2],
[0, -1, 1],
[0, 0, 1],
])
p_a_in_lidar_a = T_world_to_lidar_a @ np.append(p_a_in_world, 1) # [2, 3]
p_b_in_lidar_a = T_world_to_lidar_a @ np.append(p_b_in_world, 1) # [3, 1]
p_a_in_lidar_b = T_world_to_lidar_b @ np.append(p_a_in_world, 1) # [1, 0]
p_b_in_lidar_b = T_world_to_lidar_b @ np.append(p_b_in_world, 1) # [0, 2]
p_o_in_lidar = np.array([0, 0])
p_o_a_in_world = np.linalg.inv(T_world_to_lidar_a) @ np.append(p_o_in_lidar, 1) # [-1, -2]
p_o_b_in_world = np.linalg.inv(T_world_to_lidar_b) @ np.append(p_o_in_lidar, 1) # [2, 1]
In words:
point_ain the world frame is(1, 1)andpoint_bin the world frame is(2, -1)- After multiplying the point by the transformation matrix, we get where the points are from each LiDAR’s perspective:
point_ain LiDAR A’s frame is(2, 3)point_bin LiDAR A’s frame is(3, 1)point_ain LiDAR B’s frame is(1, 0)point_bin LiDAR B’s frame is(0, 2)
- We can get each LiDAR’s position in the world frame by applying the inverse transformation to the origin:
- LiDAR A is at
(-1, -2) - LiDAR B is at
(2, 1)
- LiDAR A is at
Here’s how this looks visually, where the axis has the origin at the world frame: